Task Trees Manager
The task trees manager supports efficient building of task-based and conventional behaviour trees, as well as provides a programming interface for managing execution of the trees. It enables robotic manipulator applications building behaviour trees by adding custom branches of behaviours to a tree skeleton. The effort is significantly less than building the tree and its behaviours from scratch.
The task trees manager has implemented the concept of task, which is defined as a branch of behaviours designed to achieve an outcome. It supports the definition of task branches in the tree, submission and cancellation of tasks, and tracking their execution.
The current version of the task trees framework provides two concrete task tree manager classes, TaskTreesManager and GuardedTaskTreesManager.
Tree Building with the TaskTreesManager Class
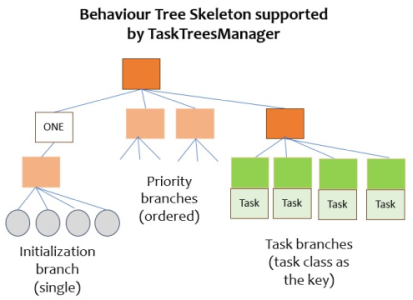
The TaskTreesManager class offers the following three ways of building customized behaviour trees.
One initialization branch: the branch of behaviours is to be executed once when the tree is first executed.
One or more task branches: a task branch is to be executed when its associated task is submitted to the tree.
One or more priority branches: a priority branch is always executed first and any task branch is executed only when all the priority branches return FAILURE status.
The following table summarizes the functions for adding the various branches.
Functions |
Parameters |
Remarks |
|---|---|---|
|
a branch of behaviour tree |
|
|
a branch of behaviour tree of type |
the earlier the addition the higher is priority |
|
a branch of behaviour tree of type |
the task class is a subclass of |
THe following steps are recommended for building a behaviour tree or task tree for a new application:
Create a subclass of
TaskTreesManager.In the constructor, call the above functions to add branches to the tree. Use one or more class functions to create the branches.
Call
_install_bt_and_spinto execute the tree.
Basics of Building and Executing Behaviour Trees
The following is an example of building a behaviour tree with one initialization branch and one priority branch.
class SimpleMoveTaskManager(TaskTreesManager):
def __init__(self, arm_commander:GeneralCommander, spin_period_ms:int=10):
super(SimpleMoveTaskManager, self).__init__(arm_commander)
self._set_initialize_branch(self.create_init_branch())
self._add_priority_branch(self.create_move_branch())
self._install_bt_and_spin(self.bt, spin_period_ms)
def create_move_branch(self) -> Composite:
move_branch = Sequence('move_branch', memory=True,
children=[
DoMoveDisplaceXYZ('move_dy', True, arm_commander=self.arm_commander, dxyz=[0.0, 0.05, 0]),
DoMoveDisplaceXYZ('move_dz', True, arm_commander=self.arm_commander, dxyz=[0, 0, 0.05]),
DoMoveDisplaceXYZ('move_ndy', True, arm_commander=self.arm_commander, dxyz=[0, -0.05, 0]),
DoMoveDisplaceXYZ('move_dz', True, arm_commander=self.arm_commander, dxyz=[0, 0, -0.05]),])
return move_branch
def create_init_branch(self) -> Composite:
# - the branch that executes the task MoveNamedPoseTask
init_branch = Sequence('init_branch', memory=True,
children=[
DoMoveXYZRPY('reset_pose', True, arm_commander=self.arm_commander, target_xyz=[0.3, -0.2, 0.3], target_rpy=[3.139, 0.0, -0.785]), ],)
return init_branch
Notes:
The initialization branch moves the end-effector to a position and orientation as defined in the function
create_init_branch.The only priority branch executes a rectangular move pattern as defined in the function
create_move_branch.The priority branch would be repeated indefintely.
An arm_commander object is required for the instant-use move behaviour. The following example main program first initializes an arm_commander object. Then create a new SimpleMoveTaskManager using the arm commander and finally call the inherited spin method
if __name__=='__main__':
try:
arm_commander = GeneralCommander('panda_arm')
arm_commander.abort_move(wait=True)
arm_commander.reset_world()
the_task_manager = SimpleMoveTaskManager(arm_commander)
the_task_manager.spin()
except Exception as e:
logger.exception(e)
Example: A Timeout Priority Branch
A conditional or guarded priority branch is common. The following shows the use of conditional function is_timeout that returns True after 15 seconds since the start. The condition function is applied to the DoMoveJointPose behaviour so that it is activated after 15 seconds. Refer to timeout_move.py under simple_moves (source code).
def __init__(self, arm_commander:GeneralCommander, spin_period_ms:int=10):
...
self._set_initialize_branch(self.create_init_branch())
self._add_priority_branch(self.create_timeout_branch())
self.start_time = time.time()
self._install_bt_and_spin(self.bt, spin_period_ms)
...
def is_timeout(self, duration=30):
return time.time() - self.start_time > duration
def create_timeout_branch(self) -> Composite:
timeout_branch = Sequence('move_branch', memory=True,
children=[
DoMoveJointPose('reset_pose', {'_fn': self.is_timeout, 'duration': 15},
arm_commander=self.arm_commander,
target_joint_pose=[0.00, -1.243, 0.00, -2.949, 0.00, 1.704, 0.785],),
],)
return timeout_branch
def create_init_branch(self) -> Composite:
init_branch = Sequence('init_branch', memory=True,
children=[
DoMoveXYZ('move_xyz', True, arm_commander=self.arm_commander, target_xyz=
lambda: [random.uniform(0.1, 0.5), random.uniform(-0.3, 0.3), random.uniform(0.2, 0.6)]),
],)
return init_branch

In the above animation for this example, the initialization branch extends the arm. At 15 seconds since the start of the program, the DoMoveJointPose behaviour in the priority branch is activated by the is_timeout condition.
Tasks Definition and Adding Task Branches
The task notion supported by the task trees manager enables more control over the execution of behaviours.
A task tree has one or more task branches plus one or more priority branches and the initialization branches. The task branches are guarded and will not get executed until the task tree manager receives a submitted task. During the task execution, the task manager entertains queries on the execution state and the option to cancel the task. After the task execution, the task manager can be consulted on whether the execution was successful or details of the error occurred.
The following shows how to define a task MoveRectTask, define the associated task branch and add the branch to the task tree. Refer to the program task_move_1.py under task_moves (source code).
The branch of the task executes a rectangular motion once.
A task definition is a subclass of BasicTask.
class MoveRectTask(BasicTask):
def __init__(self):
super(MoveRectTask, self).__init__()
class SimpleTaskMoveManager(TaskTreesManager):
def __init__(self, arm_commander:GeneralCommander, spin_period_ms:int=10):
super(SimpleTaskMoveManager, self).__init__(arm_commander)
...
self._add_task_branch(self.create_move_rect_branch(), MoveRectTask)
self._install_bt_and_spin(self.bt, spin_period_ms)
def create_move_rect_branch(self) -> Composite:
move_branch = Sequence( 'move_branch', memory=True,
children=[
DoMoveDisplaceXYZ('move_dy', True, arm_commander=self.arm_commander, dxyz=[0.0, 0.3, 0]),
DoMoveDisplaceXYZ('move_dz', True, arm_commander=self.arm_commander, dxyz=[0, 0, 0.3]),
DoMoveDisplaceXYZ('move_ndy', True, arm_commander=self.arm_commander, dxyz=[0, -0.3, 0]),
DoMoveDisplaceXYZ('move_random_ndz', True, arm_commander=self.arm_commander,
dxyz=lambda: [0.0, 0.0, random.uniform(-0.25, -0.35)]),
],)
return move_branch
In the function call to _add_task_branch the task branch created in create_move_rect_branch is passed together with class reference MoveRectTask.
Example: Task Execution
The task tree manager then awaits order to execute the MoveRectTask. To execute the task, call submit_task of the task trees manager.
The following class creates the task manager defined above, and then executes the MoveRectTask ten times in a for loop.
class TaskDemoApplication():
""" The application program for the simple Task Demo
"""
def __init__(self):
...
self.the_task_manager = SimpleTaskMoveManager(self.arm_commander)
self._run_demo()
...
def _run_demo(self):
task_manager = self.the_task_manager
the_task = None
logger.info(f'=== Task Demo Started')
for i in range(10):
logger.info(f'=== Submit a MoveRectTask #{i + 1}')
task_manager.submit_task(the_task:=MoveRectTask())
the_task.wait_for_completion()
Notes:
The call to
submit_taskis asynchronous. TheMoveRectTasktask object is the handle for tracking the task execution.The function call to
wait_for_completionis blocking until the task has entered into one of the completion states. The list of completion states can be found in states.py
The following loop could replace the call to wait_for_completion.
from task_trees.states import COMPLETION_STATES
...
while True:
if the_task.get_state() in COMPLETION_STATES:
break
time.sleep(0.1)
Example: Task Cancellation
Call the cancel_task function on the task object to cancel the task.
self.the_task.cancel(wait=True)
If the parameter wait is True, the function call will not return until the cancellation is completed. Usually, a loop to monitor the task state is needed. Note that although the eventual state is usually TaskStates.ABORTED, in a situation which the task is just completed (successful or otherwise) when the cancel function is called, the task may end up in other states.
the_task.cancel(wait=True)
while True:
if the_task.get_state() in COMPLETION_STATES:
break
time.sleep(0.1)
Refer to the example task_move_4.py under task_moves (source code). The example cancels the executing task when the GUI receives the command to execute another task.
List of task states
States |
Is Completion |
Remarks |
|---|---|---|
TaskStates.SUCCEEDED |
Yes |
|
TaskStates.ABORTED |
Yes |
the task has been cancelled |
TaskStates.GUARD_ABORTED |
Yes |
the task has been aborted by the task tree guard |
TaskStates.FAILED |
Yes |
the task experienced a failure |
TaskStates.INVALID |
Yes |
the task submission was invalid |
TaskStates.SUBMITTED |
No |
the task has just been submitted but not executed yet |
TaskStates.WORKING |
No |
the associated task branch is being executed |
TaskStates.STANDBY |
No |
the task has not yet been submitted |
Task Parameters
The task trees manager supports parameters in task definition.
The following task, which moves to a random y position, has two parameters min_y and max_y that confine the range.
class MoveRandomTask(BasicTask):
def __init__(self, min_y:float, max_y:float):
super(MoveRandomTask, self).__init__()
self.min_y = min_y
self.max_y = max_y
The task branch has a behaviour that obtains the move target from a function (i.e. dynamic binding).
def create_move_random_branch(self) -> Composite:
move_branch = Sequence('move_branch', memory=True,
children=[
DoMoveXYZ('move_random_y', True, arm_commander=self.arm_commander, target_xyz=self.generate_random_xyz),
],)
return move_branch
The definition of the function generate_random_xyz is shown below, which accesses the task object and the two parameters through the blackboard of py-trees. The framework provides access to the task object under the key ‘task’ on the py-trees blackboard.
def generate_random_xyz(self) -> list:
if not self.the_blackboard.exists('task'):
raise TypeError(f'unable to generate random pose due to no task has been submitted')
min_y = self.the_blackboard.task.min_y
max_y = self.the_blackboard.task.max_y
xyz = [None, random.uniform(min_y, max_y), None]
return xyz
List of TaskTreesManager Functions
Functions |
Parameters |
Remarks |
|---|---|---|
shutdown |
Shutdown the task manager properly |
|
_define_named_poses |
scene configuration object |
extract the named poses and add to the arm commander |
_define_objects |
scene configuration object |
extract the collision object definitions and add to the arm commander |
_set_initialize_branch |
a tree branch |
setup the initialization branch |
_add_priority_branch |
a tree branch |
add the branch as a priority branch |
_add_task_branch |
a tree branch and the task class definition |
add a task branch |
display_tree |
the branch to display (optional) |
output the graphical representation of the tree or a subtree |
List of BasicTask Functions
Functions |
Parameters |
Remarks |
|---|---|---|
get_state |
return the state of the task |
|
cancel |
wait |
cancel the task and return immediately if wait is False |
wait_for_completion |
block until the task is completed |
|
wait_for_working |
block until the task is in the WORKING state |
|
get_time_since_submit |
return the time lapsed since task submission |
|
get_commander_feedback |
return the final message from the arm commander on this task |
Tree Building with the GuardedTaskTreesManager Class
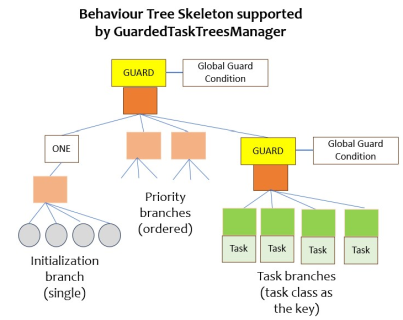
Another manager included in the task trees framework is GuardedTaskTreesManager. This is a subclass of TaskTreesManager and the additional features are two guard conditions that can inactivate the whole behaviour tree and inactivate the task branches respectively.
The class provides two functions for setting up the guard conditions.
set_global_guard_condition_fn(global_guard_condition_fn): the whole behaviour tree is inactivated if the functionglobal_guard_condition_fnreturnsFalse.set_task_guard_condition_fn(task_guard_condition_fn): the task branches are inactivated if the functiontask_guard_condition_fnreturnsFalse.
The current task will be aborted and its state changed to TaskStates.GUARD_ABORTED.
By default, the GuardedTaskTreesManager requires a call to reset_guard after inactivation. The constructor offers a parameter to change the guard_reset to False so that the behaviour tree is reactivated once the guard condition returns True again.
Examples
A simple example is given in the program estop_move.py under task_moves (source code).
A more advanced example can be found in the demo program PickNDrop.