Programming Guide to Move Behaviours
The programming guide to the instant-use move behaviour classes is covered in the first part. The second part covers the utility instant-use behaviours.
The Move Target of Instant-Use Move Behaviours
The move IUB classes are designed to model a robotic manipulator (or one of its parts) moving to a target. As there are different possible forms of move targets, Move IUB classes operating on different move target forms are available for the convenience of developers. The acceptable forms of move targets and their corresponding move IUB class are listed below.
A logical named pose of joint values:
DoMoveNamedPoseA list of physical joint values:
DoMoveJointPoseA list of 6 numbers representing the pose in (xyzrpy) format:
DoMovePose,DoMoveXYZRPYA list of 7 numbers representing the pose in (xyzqqqq) format:
DoMovePoseA
PoseStampedorPoseobject:DoMovePoseA list of 3 numbers representing an orientation (rotation) in (rpy) format:
DoRotateA list of 3 numbers representing a position in (xyz) format:
DoMoveXYZA list of 3 numbers representing a displacement in (dxdydz) format:
DoMoveDisplaceXYZMultiple poses in a list, of which each pose can be specified as a list of 6 numbers, 7 numbers,
PoseStampedobject orPoseobject:DoMoveMultiPosesMultiple positions in a list, of which each position is a list of 3 numbers in (xyz) format:
DoMoveMultiXYZ
The move target of most of these classes also supports logical binding and dynamic binding, in addition to the usual physical binding. In logical binding, a named move target is decoupled from the actual numbers in the physical scene, and it depends on mapping provided in a scene configuration file. In dynamic binding, the physical move target is queried through a function call at behaviour execution time (i.e. tick-tock time).
A multiple-component move target, such as the xyz or rpy formats, can also be composed of a list of partial specification. For example, the list [[0.2, None, None], [None, 0.6, 0.4]], in a compositional move target, is evaluated to [0.2, 0.6, 0.4]. Note that each partial specification could use logical or dynamic binding, resulting in a very expressive form of specification.
The move IUB classes support custom frames of reference. Therefore, the move target can be associated with a custom reference frame instead of the world’s frame of reference.
A Summary of Move IUB Classes
Module: task_trees.behaviours_move
Class Name |
Target Pose |
Target Physical Binding |
Target Logical Binding |
Target Dynamic Binding |
Composition |
Reference Frame |
|---|---|---|---|---|---|---|
DoMoveNamedPose |
|
No |
Yes |
No |
No |
No |
DoMoveJointPose |
|
Yes |
No |
Yes |
No |
No |
DoMovePose |
|
Yes |
No |
Yes |
No |
Constant and Late Binding |
DoMoveXYZ |
|
Yes |
Yes |
Yes |
Yes |
Yes |
DoMoveXYZRPY |
|
Yes |
Yes |
Yes |
Yes |
Constant and Late Binding |
DoRotate |
|
Yes |
Yes |
Yes |
Yes |
Constant and Late Binding |
DoMoveDisplaceXYZ |
|
Yes |
Yes |
Yes |
Yes |
Constant and Late Binding |
DoMoveMultiPoses |
|
Yes |
No |
Yes |
No |
Constant and Late Binding |
DoMoveMultiXYZ |
|
Yes |
Yes |
Yes |
Yes |
Constant and Late Binding |
Module: task_trees.behaviours_move_sense
The following class is a specialization of DoMoveXYZ, providing abortion of motion based on sensor-based collision detection.
Class Name |
Target Pose |
Constant Binding |
Logical Binding |
Late Binding |
Composition |
Reference Frame |
|---|---|---|---|---|---|---|
DoMoveXYZGuardROS |
|
Yes |
Yes |
Yes |
Yes |
Yes |
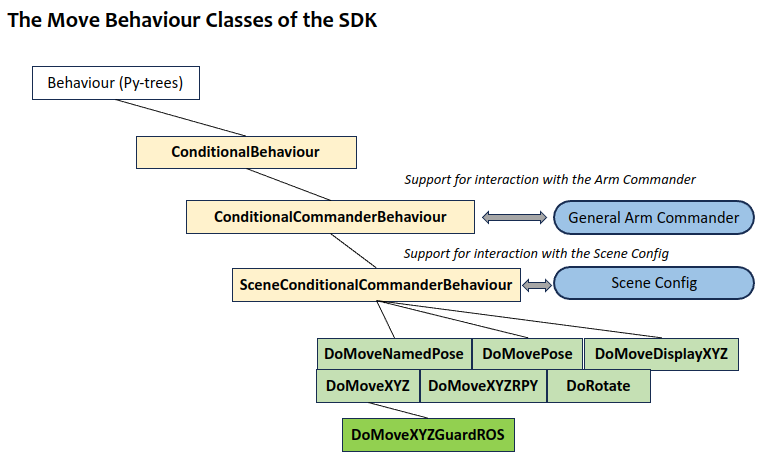
All the above move behaviour classes are based on the abstract classes of ConditionalBehaviour and ConditionalCommanderBehaviour. The first base class provides the support of conditional execution of behaviours and the second base class manages the execution of move commands. Most of the classes are also based on the abstract class of SceneConditionalCommanderBehaviour, which supports using logical scene poses in the specification of move targets.
The parentage of the motion behaviour classes is depicted below.
Using Different Bindings on Move Targets
The effective binding mode to use on a move target depends on the type. For example, the class DoMoveXYZ treats the parameter target_xyz according to whether it is a list of numbers, a string, a function, or a list consisting elements of the prior three types.
A list of 3 constant numbers is considered as a physical position specified in xyz (i.e. physical binding).
A string is considered as a logical position specified in the scene configuration file (i.e. logical binding). If the logical position is not found in the configuration file, an exception is raised.
A reference to a function definition is considered as a source where the physical position can be dynamically queried by a function call (i.e. dynamic binding).
A list consisting elements of the above three types is considered a compositional move target. Each element is then resolved to a physical xyz individually according to its type, and will then be recomposed into a xyz position.
Physical (Scene) Binding
A constant move target is etched in the program and its value is finalized and cannot be changed during execution (tick-tock) time. It requires no further resolution.
A drawback of using physcial binding is the tight coupling to a particular physical scene. A change to the physical scene or the robot manipulator necessities a change of the program code.
move_branch = py_trees.composites.Sequence('move_branch', memory=True,
children=[
DoMoveXYZ('move_start', True, arm_commander=self.arm_commander, target_xyz=[0.2, 0.3, 0.5]),
],)
In the above example, if a robot arm model of different physcial attributes needs a change in the source code.
Logical (Scene) Binding
A string representation of a move target is resolved during the execution (tick-tock) time, based on a mapping provided in the scene configuration file.
The following shows an example of using logical position and rotation names as values for the parameter target_xyz.
move_branch = py_trees.composites.Sequence(
'move_branch',
memory=True,
children=[
DoMoveXYZ('move_start', True, arm_commander=self.arm_commander, scene=self.the_scene, target_xyz='positions.start'),
DoMoveXYZ('move_end', True, arm_commander=self.arm_commander, scene=self.the_scene, target_xyz='positions.end'),
],)
The parameter scene specify the scene configuration that defines the logical names. The following is the statement for loading the scene configuration from the file task_scene_2.yaml.
self.the_scene = Scene(os.path.join(os.path.dirname(__file__), 'task_scene_2.yaml'))
The content of the file is shown below.
scene:
named_poses:
stow: [0.0, -1.244, 0.0, -2.949, 0.0, 1.704, 0.785] # from base
home: [0.0, -0.785, 0.0, -2.36, 0.0, 1.57, 0.785] # from base
positions:
start: [0.3, 0.0, 0.2]
end: [0.3, 0.0, 0.6]
subscenes:
...
An advantage of using logical positions instead of physical positions is the decoupling from the actual physical scene. A change to the physical scene or the robot model only necessities a change in the configuration file or replacing one configuration file with another. No change in the source code is required.
Dynamic Binding
Passing a function reference as a move target will have the target resolved at execution (tick-tock) time by a function call. The function is expected to return the required move target in physical form.
In the example below, the sequence of behaviours aims to grab a target object and drop it at a random position. The position of the target object has to be determined on the fly. The function get_object_position uses a sensor to estimate the best grab position of the target. The function reference is passed as the parameter target_xyz. It will get resolved everytime the behaviour is executed. The binding of the parameter is delayed until tick-tick time. Similarly, the random position should change every time and therefore the function generate_random_xyz is passed as the move target for the second DoMoveXYZ behaviour instance.
def get_object_position(self) -> list:
# obtain the best object position for the gripper from a sensor
...
return xyz
def generate_random_xyz(self) -> list:
xyz = [random.uniform(0.1, 0.5), random.uniform(-0.3, 0.3), random.uniform(0.2, 0.6)]
return xyz
...
def build_tree(self) -> Composite:
...
move_branch = py_trees.composites.Sequence( 'move_branch', memory=True,
children=[
DoMoveXYZ('move_to_object', True, arm_commander=self.arm_commander, target_xyz=self.get_object_position),
CloseGripper('grab_the_object', True, arm_commander=self.arm_commander),
DoMoveXYZ('move_random_xyz', True, arm_commander=self.arm_commander, target_xyz=self.generate_random_xyz),
OpenGripper('drop the object', True, arm_commander=self.arm_commander),
],)
The power of dynamic binding is in on-the-fly generation of move targets. The above example
Composition of the Move Target
A compositional move target specification builds the parameter value from a list of pose items.
The following example shows that the final xyz is composed from a logical position positions.xy_start that defines the x and y, and another logical position positions.z_upper that defines z.
DoMoveXYZ('move_start', True, arm_commander=self.arm_commander, scene=self.the_scene,
target_xyz=['positions.xy_start', 'positions.z_upper']),
The definitions of the two logical position names are given below.
scene:
positions:
xy_start: [0.2, 0.3, null]
xy_mid: [0.25, 0.4, null]
xy_end: [0.3, 0.6, null]
z_upper: [null, null, 0.4]
z_lower: [null, null, 0.2]
rotations:
alpha: [3.139, 0.0, -0.785]
subscenes:
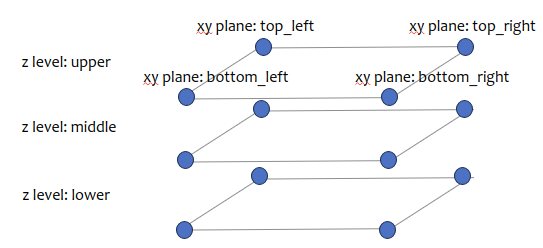
The compositional list is processed from the front to the end or until all components are specified. The first item positions.xy_start has omitted the z component and therefore the second item is examined for the missing component. The final target_xyz is computed as [0.2, 0.3, 0.4]
Compositional specification enables the separation and remixing of positional and rotational components. The following figure illustrates how 7 partial position definitions can define 12 positions without redundency, making the specification resiience to change.
Moving in a Custom Reference Frame
The parameter reference_frame accepts both the frame name representing a constant string and a function that returns a constant string. The following examples shows two DoMoveXYZ behaviours moving to different physical positions, though the target position is the same [0, 0, 0]. The frame area_1 and area_2 respectively determine the binding to the physical positions.
DoMoveXYZ('move_origin_area_1', True, arm_commander=self.arm_commander, target_xyz=[0, 0, 0], reference_frame='area_1'),
DoMoveXYZ('move_origin_area_1', True, arm_commander=self.arm_commander, target_xyz=[0, 0, 0], reference_frame='area_2')
The parameter reference_frame supports late binding as well. If the parameter value is a function definition, the reference frame is obtained when the move behaviour is actually executed.
Examples
For more examples on compositional move targets and logical position and rotation names, refer to the following tutorial pages.
Conditional Behaviours
The move behaviour classes are conditional behaviours, meaning that a condition function can be optionally passed as a parameter to the constructor. When the tick happens at the behaviour in a Sequence, a False returned from the condition function will considere the behaviour SUCCESS and the tick is moved to the next behaviour. This means the outcome of this behaviour is considered achieved and executing the behaviour is not needed. On the other hand, True condition will result in the execution of the behaviour.
Building a behaviour subtree based on conditional behaviours can adapt a sequence of behaviours to different starting state of the robot arm. Because it enables selectively execute a list of behaviours in a Sequence (and Selector), some conditional behaviours can be added for different starting states moving to planned intermediate states.
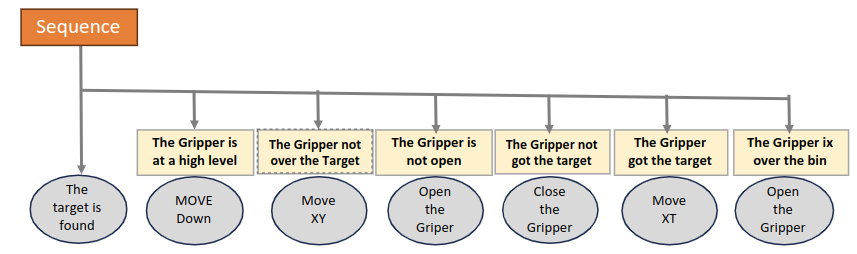
Conditional behaviour classes have separated conditions from actions in behaviours. The following example shows a sequence of behaviours designed for pick-n-drop. The ovals are the actions to be taken if the associated condition, in a rectangle, is True. The second behaviour of which the action is move down is required only if the gripper is located high up, which is specified as the condition. Examine the other conditional behaviours in the sequence and the conditions basically represent the inverse of the desirable outcome of the behaviours.
#
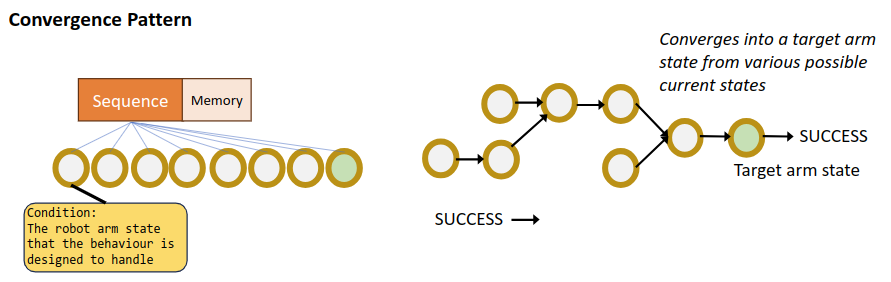
Convergence Pattern Resulting from Conditional Behaviours
Conditional behaviour classes are pivotal in the implementation of the following convergence pattern of behaviour subtrees. A use case of this pattern is to bring different starting poses through appropriate intermediate poses and finally to converge into the same outcome.
#
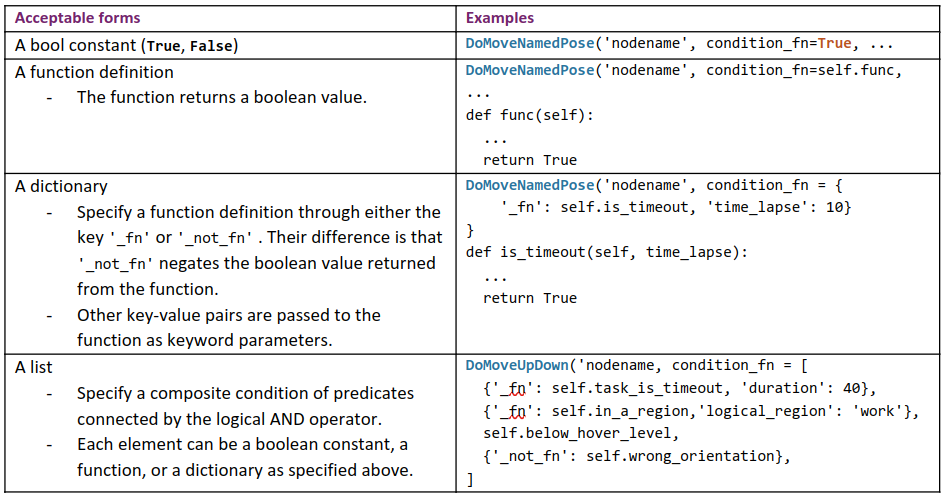
Acceptable Forms of Condition Functions
The parameter condition_fn accepts many forms, which are described in the below table.
#
The actual definitions of condition functions are usually defined in the task trees manager (i.e. a subclass) so that these functions have access to the other instance variables such as the arm_commander.
Example Behaviour Specifications
The parameter condition_fn in the constructor of subclasses of ConditionalBehaviour is queried at the ticking time of the behaviour. If the parameter is True, either from a constant or one or more conditional functions, the behaviour is executed. The behaviour is skipped if otherwise, and in this case the next behaviour (i.e. the next sibling) under the same composite parent is ticked.
Consider the following example exerpted from the GridScan demo program. The ellipsis indicates omitted parameters arm_commander and scene for clarity.
py_trees.composites.Sequence('move_named_pose_branch', memory=True,
children=[
DoMoveXYZ('move_up_if_in_water', condition_fn= [{'_fn': self.in_a_region, 'region': 'regions.work'},
{'_fn': self.below_z, 'position':'tank.positions.hover'}],
..., target_xyz='tank.positions.hover', reference_frame='the_tank' cartesian=True),
DoMoveNamedPose('move_home_first', condition_fn=[{'_fn': self.in_a_region, 'region': 'regions.work'},
{'_fn': self.on_or_above_z, 'position':'tank.positions.hover'}],
..., named_pose='named_poses.home'),
DoMoveNamedPose('move_task_pose', condition_fn=True, ..., named_pose=self.query_grid_position_of_task),
],
),
Notes:
The first behaviour named
move_up_if_in_wateris executed if both functions (self.in_a_regionandself.below_z) in thecondition_fnreturns True. The first function returns True if the end-effector is in a logical regionregions.work. The second function returns True if the z position of the end effector is higher than the logical z positiontank.positions.hover.If the condition of the first behaviour is False, the behavour is skipped. The second behaviour is then ticked.
The condition mechanism does not affect the prescribed logic of
SequenceorSelector. It only affects whether individual behaviour is actually executed at ticking.
Multi-Pose Move Behaviour Classes
The behaviour classes DoMoveMultiXYZ and DoMoveMultiPose supports continuous movement made up of multiple waypoints or intermediate poses. The use cases are quite different.
The behaviour class DoMoveMultiXYZ supports compositional waypoint xyz positions, and physical, logical, and late binding of every waypoint positions. The rotation will remain unchanged at each waypoint. Specification of the waypoints is visible in the behaviour tree building code.
The other multi-pose behaviour class DoMoveMultiPose supports specification of both position and rotation in every waypoint pose, but does not support compositional nor logical and late binding of every waypoint pose. It does support tick-tock time generation of the list of waypoints by a function, however, the waypoints are no longer visible in the behaviour tree building code.
The following shows an example of defining a multiple pose motion, exerpted from multi_move_1.py source code in the folder demos/simple_moves.
def create_move_branch(self) -> Composite:
move_branch = Sequence('move_branch', memory=True,
children=[
DoMoveMultiPose('move_xyz', True, arm_commander=self.arm_commander, target_poses=[
(0.6, 0.0, 0.4, 3.14, 0, 0),
(0.6, 0.2, 0.5, 3.14, 0, 0),
(0.6, 0.2, 0.6, 3.14, 0, 1.58),
(0.6, 0.0, 0.7, 3.14, 0, 3.14),
(0.6, -0.2, 0.6, 3.14, 0, 1.58),
(0.6, -0.2, 0.5, 3.14, 0, 0),
(0.6, 0.0, 0.4, 3.14, 0, 0),
]),
],
)
return move_branch