Introduction to the Instant-Use Behaviour Classes
The instant-use behaviour (IUB) classes of the task trees framework are all compatible with the py-trees module. They share the common base class py_trees.behaviour.Behaviour
The majority of the IUB classes supports moving the robotic manipulator. For example, the DoMoveXYZ behaviour can move to position specified by xyz subject to a prescribed condition. The rest are some utility behaviours for debugging and simulation, such as the PrintPose behaviour can display the pose of the end effector or other links.
The IUB classes are extensible as new and specialized functionality can be based on the functionality an existing base class. There are generic abstract base classes from which new functonality can be developed. For example, the ConditionalCommanderBehaviour has built-in support for managing the commands given to the arm commander, significantly simplifies the development of new move behaviour classes. Another possibility is to extend an existing concrete move behaviour class. For example, the DoMoveXYZGuardROS class has inherited the move behaviour from DoMoveXYZ and enhance it with sensor-based collision avoidance functionality.
The Programming Guide to the Instant-Use Move Behaviour Classes explains using the move behaviours in behaviour tree development.
The Programming Guide to the Instant-Use Utility Behaviour Classes explains using the utility behaviours in behaviour tree development.
The Instruction on Creating New Behaviour Classes describes the hierarchy of base IUB classes and shows how to create new behaviour classes.
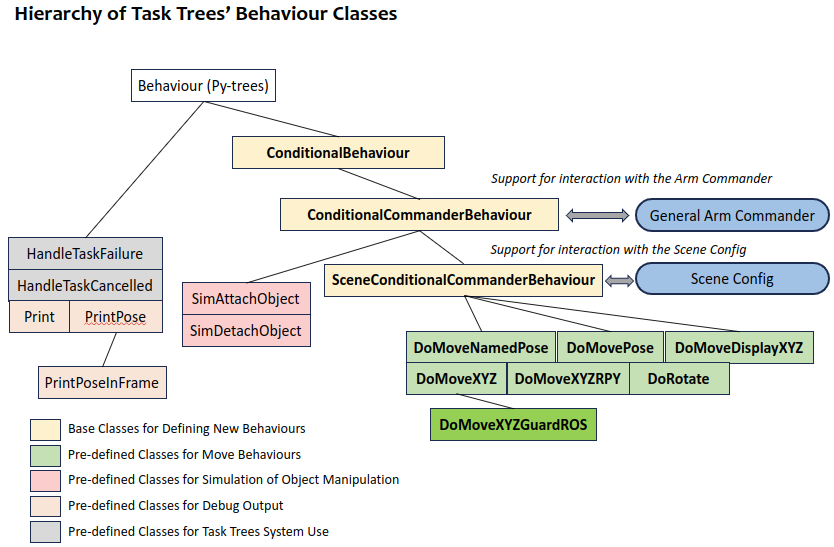
The following figure describes all the behaviour classes and their dependencies in the extension package.
PyTree Programming with the IUB Classes
The nominal way is to create instances of IUB classes in a Composite branch of a py-tree. The following code snippet comes from simple_move_1.py (source code) in the pytrees_moves demo folder. It demonstrates adding a behaviour instance of DoMoveXYZ as child of a py-tree Sequence.
class SimpleMovePyTreesApplication():
def __init__(self, arm_commander:GeneralCommander, spin_period_ms:int=10):
self.arm_commander:GeneralCommander = arm_commander
self.arm_commander.reset_world()
self.arm_commander.wait_for_ready_to_move()
self.root_sequence = self.create_move_branch()
self.bt = BehaviourTree(self.root_sequence)
self.the_thread = threading.Thread(target=lambda: self.bt.tick_tock(period_ms=spin_period_ms), daemon=True)
self.the_thread.start()
def create_move_branch(self) -> Composite:
move_branch = Sequence ('move_branch', memory=True, children=[
DoMoveXYZ('move_xyz', True, arm_commander=self.arm_commander, target_xyz=[0.3, 0.0, 0.6]), ],)
return move_branch
Note that DoMoveXYZ is based on ConditionalCommanderBehaviour which uses the arm commander for actually executing the move command. The arm_commander object, which is associated with a particular move group of the robot manipulator, is an essential parameter.
The parameter target_xyz specifies the target position. In the above example, a constant position is passed to the constructor. DoMoveXYZ and most other move IUB classes also accept a string typed logical position (mapping to the physical position according to a scene configuration file) and a function that returns a physical position. The move IUB classes also supports static and dynamic composition of the move target, and the use of a conditional function to regulate the behaviour execution. Refer to the Programming Guide for the details.
Using the IUB Classes with the Task Trees Framework
The IUB classes are best working with the Task Trees Manager, which can accelerate the development of more sophisicated behaviour trees.
The following code snippet comes from simple_move_1.py in the simple_moves demo folder. The class TaskTreesManager offers a behaviour tree template and built-in support for task-to-motion modelling and task execution management.
class SimpleMoveTaskManager(TaskTreesManager):
def __init__(self, arm_commander:GeneralCommander, spin_period_ms:int=10):
super(SimpleMoveTaskManager, self).__init__(arm_commander)
...
self._add_priority_branch(self.create_move_branch())
self._install_bt_and_spin(self.bt, spin_period_ms)
def create_move_branch(self) -> Composite:
move_branch = Sequence('move_branch', memory=True,
children=[DoMoveXYZ('move_xyz', True, arm_commander=self.arm_commander, target_xyz=[0.3, 0.0, 0.2]),
DoMoveXYZ('move_xyz', True, arm_commander=self.arm_commander, target_xyz=[0.3, 0.0, 0.6]),],
)
return move_branch
The above example uses the template of TaskTreesManager for building a behaviour tree. It has not utilized the task execution service of the manager.
To understand more about the task trees manager, refer to the Programming Guide to Task Trees Manager for instructions and examples.