Overview of the API of RViz Marker Tools
![]()
The Marker object creation helper functions
The functions are listed in the table below.
Functions |
Descriptions |
Remarks |
|---|---|---|
create_axisplane_marker |
A plane object indicating an axis plane (xy, yz, or xz) given a 2D bounding box |
|
create_cube_marker_from_bbox |
A 3D box object given a 3D bounding box |
The bbox is aligned with the axes of the reference frame |
create_cube_marker_from_xyzrpy |
A 3D box object given the position, orientation and dimension |
The position, orientationm and dimension can all be specified |
create_arrow_marker |
An arrow marker |
|
create_line_marker |
A line marker |
|
create_path_marker |
A path marker made up of multiple waypoints |
|
create_sphere_marker |
A sphere marker |
|
create_cylinder_marker |
A cylinder marker |
|
create_text_marker |
A text marker |
|
create_mesh_marker |
An object marker specified by a mesh file |
Common Parameters in the Marker-creation Functions
The following table lists the common parameters to all the marker-creation functions. The parameters name and id form a composite key that must be unique.
| Parameters | Remarks | Examples |
| ——— | —— | ——– |
| name | The namespace of the marker | A string |
| id | The id of the marker | An integer |
| reference_frame | The marker’s reference frame | |
| rgbs | The colour of the marker | A list of RGB 3 values or RGBA 4 values (each value is 0 to 1) |
| lifetime | The visible duration in seconds. Only applicable to temporary markers | A number or rospy.Duration |
Axis-plane Markers
Use the function create_axisplane_marker to create a plane marker that is aligned with one of the 3 axis plane.
rv = RvizVisualizer()
# add a axis plane marker on xy plane as a persistent marker to the RVizVisualizer
axis_plane_marker_xy = create_axisplane_marker(name='axisplane', id=1, bbox2d=[-1, -1, 1, 1], offset=2, reference_frame='map', axes='xy', rgba=[1, 0, 0])
rv.add_persistent_marker(axis_plane_marker_xy)
# add a axis plane marker on xy plane as a persistent marker to the RVizVisualizer
axis_plane_marker_xz = create_axisplane_marker(name='axisplane', id=2, bbox2d=[-1, -1, 1, 1], offset=2, reference_frame='map', axes='xz', rgba=[0, 1, 0])
rv.add_persistent_marker(axis_plane_marker_xz)
# add a axis plane marker on yz plane as a persistent marker to the RVizVisualizer
axis_plane_marker_xz = create_axisplane_marker(name='axisplane', id=3, bbox2d=[-1, -1, 1, 1], offset=2, reference_frame='map', axes='yz', rgba=[0, 0, 1])
rv.add_persistent_marker(axis_plane_marker_xz)
The axis plane markers are rectangles algined with one of the three axis planes (xy, xz, or yz) in a reference frame. They are useful to indicate planes in movement planning.
Parameters |
Remarks |
Examples |
|---|---|---|
bbox2d |
A list of 4 numbers defining the bounding box |
[xmin, ymin, xmax, ymax] for the xy plane |
offset |
The perpendicular distance to the zero plane |
offset of 2 for the xy plane means that the marker is at z = 2 |
axes |
The axis plane |
xy, yz, or xz |
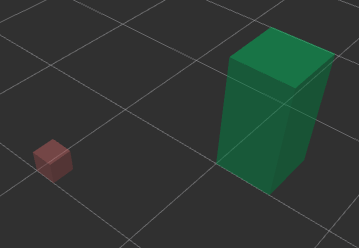
Cuboid Markers specified in 3D Bounding-box
Use the function create_cube_marker_from_bbox to create a cuboid marker defined by a 3D bounding box.
# add a small cube marker
cube_marker_1 = create_cube_marker_from_bbox(name='cube', id=1, bbox3d=[0, 0, 0, 0.2, 0.2, 0.2], reference_frame='map',
rgba=[1.0, 0.5, 0.5, 0.5])
rv.add_persistent_marker(cube_marker_1)
# add a larger cube marker
cube_marker_2 = create_cube_marker_from_bbox(name='cube', id=2, bbox3d=[1, 1, 0, 1.5, 1.5, 1.0], reference_frame='map',
rgba=[0.0, 1.0, 0.5, 0.5])
rv.add_persistent_marker(cube_marker_2)
Parameters |
Remarks |
Examples |
|---|---|---|
bbox3d |
A list of 6 numbers defining the bounding box |
[xmin, ymin, zmin, xmax, ymax, zmax] for the 3D box |
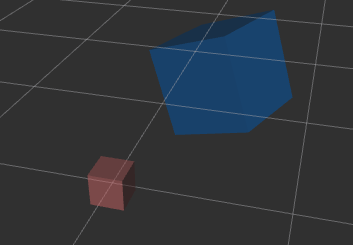
Cuboid Markers specified in XYZRPY and Dimensions
Use the function create_cube_marker_from_bbox to create a cuboid marker defined by a 3D bounding box.
# add a small cube marker
cuboid_marker_1 = create_cube_marker_from_xyzrpy(name='cube', id=1, xyzrpy=[0, 0, 0, 0, 0, 0], reference_frame='map',
dimensions=0.2, rgba=[1.0, 0.5, 0.5, 0.5])
rv.add_persistent_marker(cuboid_marker_1)
# add a larger cube marker
cuboid_marker_2 = create_cube_marker_from_xyzrpy(name='cube', id=2, xyzrpy=[0.5, 0.5, 0.5, 1.2, 0.0, 1.2], reference_frame='map',
dimensions=0.5, rgba=[0.0, 0.5, 1.0, 0.5])
rv.add_persistent_marker(cuboid_marker_2)
Parameters |
Remarks |
Examples |
|---|---|---|
xyzrpy |
A list of 6 numbers defining the pose in xyzrpy format |
|
dimensions |
The size of a cube or the three dimensions of a cuboid |
A number or a list of 3 numbers |
Arrow Markers
Use the function create_arrow_marker to create an arrow of a given pose and thickness.
arrow_marker = create_arrow_marker(name='arrow', id=3, xyzrpy=[1, 1, 1, 0, 3.14, 0], reference_frame='map',
dimensions=0.50, rgba=[1.0, 0.5, 0.5, 1.0])
rv.add_persistent_marker(arrow_marker)
Parameters |
Remarks |
Examples |
|---|---|---|
xyzrpy |
A list of 6 numbers defining the pose in xyzrpy format |
|
dimensions |
The thickness of the arrow |
A number |
Line Markers
Use the function create_line_marker to create an line defined by the start and the end positions.
line_marker = create_line_marker(name='line', id=i, xyz1=[0.5, 0, 0], xyz2=[0.5, 1, 0], reference_frame='map',
line_width=0.02, rgba=[1.0, 1.0, 0.0, 1.0])
rv.add_persistent_marker(line_marker)
Parameters |
Remarks |
Examples |
|---|---|---|
xyz1 |
The position of one end of the line |
A list of 3 numbers xyz |
xyz2 |
The position of the other end of the line |
A list of 3 numbers xyz |
line_width |
The thickness of the line |
A number |
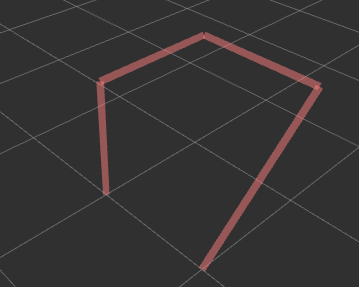
Path Marker
A path is line with zero of more waypoints. Use the function create_path_marker to create a path defined by two or more positions in a list.
path_marker = create_path_marker(name='path', id=1, xyzlist=[(0, 0, 0), (0, 0, 1), (0, 1, 1), (1, 1, 1), (1, 0, 0)], reference_frame='map',
line_width=0.05, rgba=[1.0, 0.5, 0.5, 0.5])
rv.add_persistent_marker(path_marker)
Parameters |
Remarks |
Examples |
|---|---|---|
xyzlist |
The positions of the start, end and the waypoints in between of a path |
A list of xyz positions in a tuple or a list |
line_width |
The thickness of the line |
A number |
Sphere Marker
Use the function create_sphere_marker to create a path defined by two or more positions in a list.
sphere_marker = create_sphere_marker(name='sphere', id=1, xyz=[1, 1, 1], reference_frame='map', dimensions=0.20, rgba=[1.0, 0.5, 0.5, 1.0])
rv.add_persistent_marker(sphere_marker)
Parameters |
Remarks |
Examples |
|---|---|---|
xyz |
The centre position of the sphere |
A list of three numbers (xyz) |
dimensions |
The size of the sphere |
A number |
Cylinder Marker
Use the function create_cylinder_marker to create a cylinder defined by the pose and the dimensions in x, y, and height.
cylinder_marker = create_cylinder_marker(name='path', id=1, xyzrpy=[0, 0.5, 0.5, 0, 0, 0], reference_frame='map',
dimensions=[0.2, 0.2, 0.5], rgba=[1.0, 1.0, 0.5, 0.5])
rv.add_persistent_marker(cylinder_marker)
Parameters |
Remarks |
Examples |
|---|---|---|
xyzrpy |
The pose of the cylinder |
A list of 6 numbers (xyzrpy) |
dimensions |
The x, y dimension and the height |
A list of 3 numbers |
Mesh Marker
Use the function create_mesh_marker to create a marker based on a mesh object, which is defined in a STL or DOE file.
# computing the full path of the stl file
teapot_mesh = 'file://' + os.path.join(os.path.dirname(__file__), '../docs/assets/UtahTeapot.stl')
# teapot_mesh = os.path.join(os.path.dirname(__file__), '../docs/assets/UtahTeapot.stl')
# teapot_mesh = 'package://rviz_marker_tools/docs/assets/UtahTeapot.stl'
# teapot_mesh = 'rviz_marker_tools/docs/assets/UtahTeapot.stl'
mesh_marker = create_mesh_marker(name='teapot', id=1, file_uri=teapot_mesh, xyzrpy=[-1.0, -1.0, 0.0, 0, 0, 0],
reference_frame='map', dimensions=[0.05, 0.05, 0.05], rgba=[0.5, 1.0, 1.0, 1.0])
rv.add_persistent_marker(mesh_marker)
Parameters |
Remarks |
Examples |
|---|---|---|
file_uri |
The uri of the STL or DOE file containing the mesh object |
A string |
xyzrpy |
The pose of the mesh object |
A list of 6 numbers (xyzrpy) |
dimensions |
The dimensions of the mesh object |
A list of 3 numbers or a single number |
The file_uri can be specified in one of the several formats.
Full path:
/home/qcr/catkin_ws/src/rviz_marker_tools/docs/assets/UTahTeapot.stlLocal path under the package:
rviz_marker_tools/docs/assets/UTahTeapot.stlThe
fileprotocol:file:///home/qcr/catkin_ws/src/rviz_marker_tools/docs/assets/UTahTeapot.stlThe
packageprotocol:package://rviz_marker_tools/docs/assets/UtahTeapot.stl
Note that the file location must be accessible by RViz if the above formats are specified if RViz is running on another computer.
Text Marker
Use the function create_text_marker to create a text marker at a pose of a particular size.
text_marker_1 = rv.add_persistent_marker(create_text_marker(name='text', id=1, text='Hello', xyzrpy=[0, 0, 0, 0.2, 0, 0], reference_frame='world', dimensions=0.3))
text_marker_2 = rv.add_persistent_marker(create_text_marker(name='text', id=2, text='World', xyzrpy=[0, 1, 0, 0.2, 0, 0], reference_frame='world', dimensions=0.3))
Parameters |
Remarks |
Examples |
|---|---|---|
text |
The text to be displayed |
A string |
xyzrpy |
The pose of the text block |
A list of 6 numbers (xyzrpy) |
dimensions |
The size of the text block |
One number |
Developer
Dr Andrew Lui, Senior Research Engineer
Robotics and Autonomous Systems, Research Engineering Facility
Research Infrastructure
Queensland University of Technology
Latest update: May 2024