The Arm Commander
Overview of The Arm Commander
![]()
Robotics and Autonomous Systems Group, Research Engineering Facility, Research Infrastructure Queensland University of Technology
Introduction
The Arm Commander is a Python programming module for accelerating the development of robot arm manipulation applications. It provides programming access to general executing and tracking services for robot arm and end-effector manipulation. Application developers are spared from implementing the same services and primed for creating higher-level manipulation sequences. The programming effort can be significanly reduced.
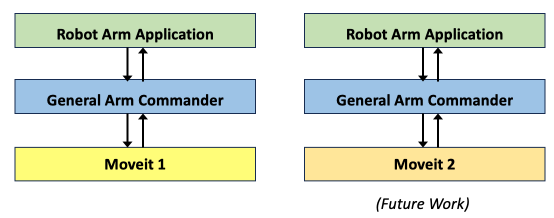
The arm commander defines a model programming interface for general robot arm manipulation and comprises the components for mapping move commands between the application and the underlying robotic manipulation platforms or arm movement planners such as Moveit. It is expected that applications based on the Arm Commander can switch between Moveit 1, Moveit 2, and other platforms almost seamlessly. The current version works with Moveit 1 and ROS Noetic. A long-term objective is to attain manipulation platform angostic and robot model agnostic support of application development.
The arm commander is a critical component of the Task Trees, which is a SDK for building reusable and resilient behaviour tree-based robotic manipulation applications. Refer to the Task Trees Github Repo for the details.
The following figure the relation between the application, the arm commander, and the underlying robotic manipulation platform.
Application Development with the Arm Commander
Application development can be made significantly simpler with the arm commander, which has implemented several processes essential in the interaction with the underlying robotic manipulation platform (i.e. Moveit).
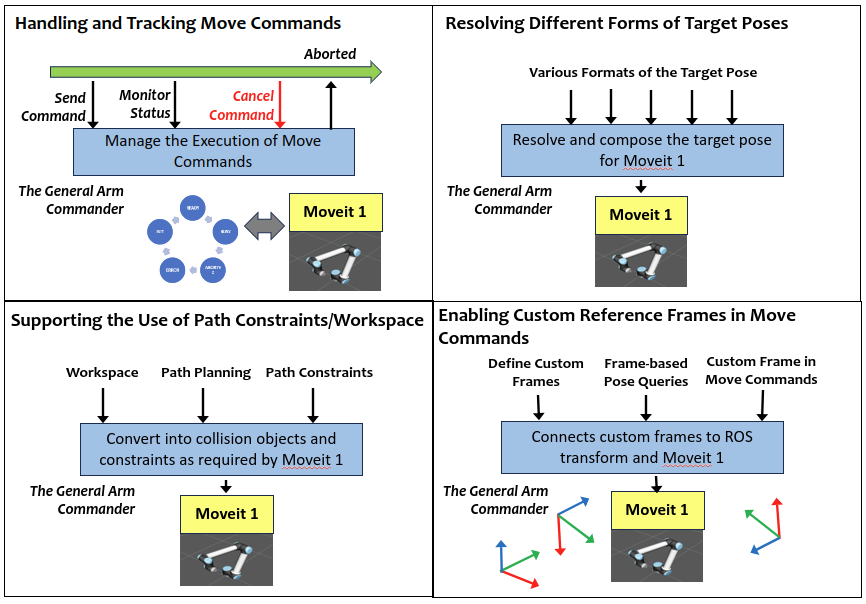
Handling and Tracking Move Commands
Applications can use the support of the arm commander to issue, track and abort move commands, and can alternatively delegate the tracking to the arm commander. The arm commander supports synchronoization and error recovery.
Resolving Different Forms of Target Pose
Applications can specify the target pose in different forms. generally, the target pose can be in the form of a Pose object, a PoseStamped object, a list of 6 numbers representing (xyzrpy) or 7 numbers representing (xyzqqqq). Its components, the position and the rotation, can be specified individually while the other component is fixed at the current value. In addition, each of the xyz components of the position or the rpy components of the rotation can also be specified individually. For example, the end-effector can be moved to a new position in the x axis, while the y axis, z axis, and the rotation will remain the same. The Arm Commander resolves and re-packages the move commands appropriately for the underlying Moveit 1.
Supporting the Use of Workspace and Constraints
Applications can define the workspace to confine the end-effector within a 3D bounding box. They can also exploit helper functions to create various path constraints to regulate the joint status and the end-effector’s pose during the execution of a move command.
Enabling Custom Reference Frames in Move Commands
Applications can define custom reference frames for specifying move commands relative to different local contexts.
Design Patterns of Arm Commander-based Robotic Manipulation Applications
The Application Design Gallery page presents several probable designs of robotic manipulation applications based on the arm commander and a robotic manipulation platform.
The Application Programming Interface (API)
The application programming interface (API) of the Arm Commander can be divided into three groups of functions:
Issuing and tracking move commands
Defining the workspace, collision objects, and custom frames of reference
Querying the status of the robot arm and the system
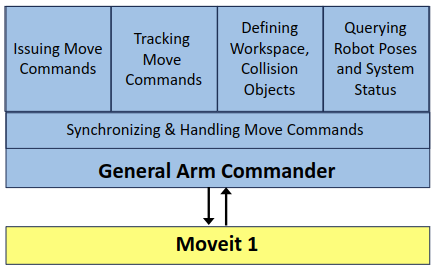
The API Overview page has organized the available functions for browsing. The Full API Reference is also available for reference.
Installation
The Installation Guide describes a docker-based and a non-docker based procedures.
The Demonstration Application
The demo application is located at examples/commander_demo.py. The demo requires a running Panda model on RViz.
roslaunch panda_moveit_config demo.launch
Then execute the demo application.
cd ~/arm_commander_ws
source devel/setup.bash
/usr/bin/python3 ./src/arm_commander/arm_commander/commander_demo.py
The demo program is registered with the catkin workspace. The last command may be replaced by the following.
rosrun arm_commander commander_demo.py
Programming Tutorials and Examples
A set of tutorials and example programs are provided in this package.
Developers
Dr Andrew Lui, Senior Research Engineer
Dr Dasun Gunasinghe, Senior Research Engineer
Robotics and Autonomous Systems, Research Engineering Facility
Research Infrastructure
Queensland University of Technology
Latest update: Feb 2024