Programming Tutorial Part 1
Part 1 of the tutorial covers the basics of programming with the arm commander package, including the first programs covering the essentials of the package and the primitive move commands.
Follow the Installation Guide to get the arm commmander ready on your computer.
Structure of the Example Program Folder
Example programs are provided for illustrating how to use the general arm commander package in programming robot arm manipulations. They are can found under the directory examples. The programs are divided into sub-directories:
├── examples
| ├── collision examples on collision avoidance, collision objects and path constraints
| ├── framenove examples on custom frames and movememnt with reference to custom frames
| ├── config the config files for running the commander_demo.py on different robot arm models
| ├── move examples on basic movement
| ├── multimove examples on multi-waypoint movement
| ├── named_poses examples on movement to named poses and the loading of named poses specification
Programming Essentials
The essential Python modules are found in the following three files.
commander_moveit.py: defines main classes including theGeneralCommander.states.py: defines the keyEnumclasses for state management.moveit_tools.py: defines utility and helper functions.
Import the Arm Commander in Python
To use the Python arm_commander interface, import the modules in the concerned Python program file as below.
from arm_commander.commander_moveit import GeneralCommander
from arm_commander.states import ControllerState, GeneralCommanderStates
import arm_commander.moveit_tools as moveit_tools
The First Program
The program file move/simple_move_1.py illustrates the essentials of programming with the arm commander.
Create the General Arm Commander
The string parameter panda_arm specifies the move_group as defined in the robot arm configuration (panda_moveit_config).
arm_commander:GeneralCommander = GeneralCommander('panda_arm')
arm_commander.spin(spin_in_thread=True)
arm_commander.wait_for_ready_to_move()
Important: The Threading Model
The GeneralCommander object must run in a different thread from the client that uses the object. The independent thread can be created as part of the call to the spin() function as shown below.
arm_commander.spin(spin_in_thread=True)
Alternatively, the client can create a new thread and use it to execute the spin function. In this case, the parameter spin_in_thread should be False and the function call will not return, as shown below.
class ArmCommanderMoveExample():
def __init__(self):
...
arm_commander:GeneralCommander = GeneralCommander('panda_arm')
self.arm_commander = arm_commander
self.the_thread = threading.Thread(target=self.spin_commander, daemon=True)
self.the_thread.start()
...
def spin_commander(self):
self.arm_commander.spin(spin_in_thread=False)
Graceful Handling of Program Interrupts
As a good practice, client programs of the general arm commander should abort any move command before termination (whether self-induced or otherwise). The following is recommended.
class ArmCommanderMoveExample():
def __init__(self):
...
signal.signal(signal.SIGINT, self.stop)
arm_commander: GeneralCommander = GeneralCommander('panda_arm')
self.arm_commander = arm_commander
...
def stop(self, *args, **kwargs):
self.arm_commander.abort_move()
self.arm_commander.clear_path_constraints()
self.arm_commander.reset_world()
Move to a XYZ Position
Make a call to one of the move functions of the arm commander to move the robot arm’s end effector to a position. For example, the following call to move_to_position moves the end effector to the location (x, y, z) = (0.0, 0.0, 0.4).
# send a move command
arm_commander.move_to_position(x = 0.6, y = 0.0, z = 0.4, wait=True)
arm_commander.reset_state()
The general arm commander uses states to regulate the interaction with the client program. For example, the state notifies the client if the command was successful or failed.
...
arm_commander.move_to_position(x = 0.6, y = 0.0, z = 0.4, wait=True)
the_state = arm_commander.get_commander_state()
if the_state == GeneralCommanderStates.SUCCEEDED:
print('The move was successful')
elif the_state in [GeneralCommanderStates.ABORTED, GeneralCommanderStates.ERROR]:
print(f'Error: {arm_commander.get_error_code()}')
Reset to the Stow Pose
The robot arm may get stuck in the examples if its initial pose is problematic for the planned movement. The program file reset_robot.py can be used to reset the robot arm back to the stow pose, which should be a reliable pose for starting any movement.
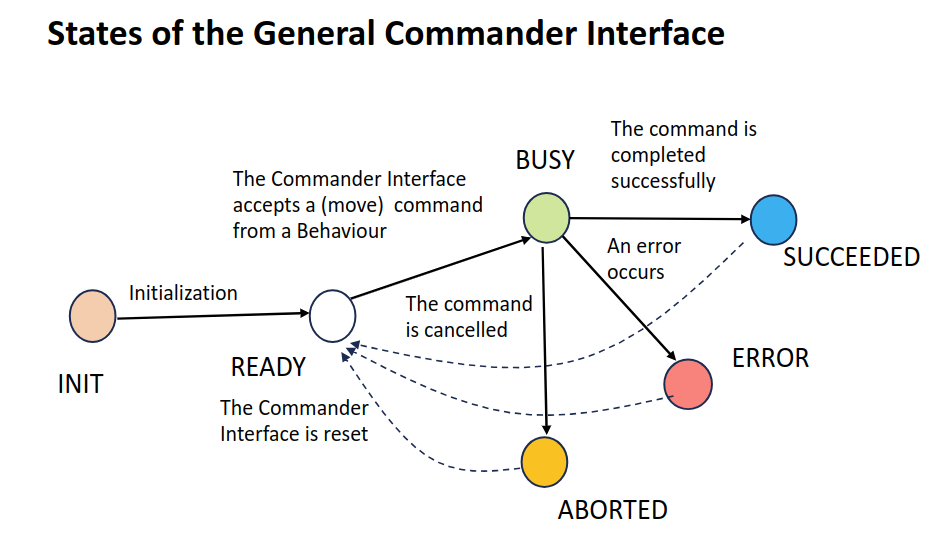
The States of the General Arm Commander
The following figure shows the states of the general arm commander and their significance to the client programs
Asynchronous Commands
Specifying move commands asynchronously enables the execution of other tasks while the move command is being handled by the general arm commander. Set the parameter wait to False to signify that the command is asynchronous. The execution returns to the caller before the command is completed.
Addition logic is required for asynchronous move commands, such as a polling loop as below. The source code is from simple_move_2.py.
...
arm_commander.move_to_position(x = -0.6, y = 0.2, wait=False)
while True:
the_state = arm_commander.get_commander_state()
if the_state not in [GeneralCommanderStates.BUSY]:
break
time.sleep(0.1)
arm_commander.reset_state()
...
Alternatively, use the function wait_for_busy_end() for a blocking wait of the end of the BUSY state.
Abort the Current Move Commands
The function abort_move() terminates the current move command. If the parameter wait is True, the function does not return until the abort has been
handled by the underlying platform completely and the state will become GeneralCommanderStates.ABORTED.
The following source code is from simple_move_3.py.
...
arm_commander.move_to_position(x = -0.6, y = 0.2, wait=False)
# abort the command after 3 seconds and wait for the abort to take effect
time.sleep(3.0)
arm_commander.abort_move(wait=True)
arm_commander.reset_state()
...
Move Commands to a Position or Orientation
Move to a position
The function move_to_position() commands (the end-effector of) the arm to move to a position specified in XYZ.
The XYZ are specified as three component parameters.
Their parameter values are defaulted to the current XYZ. In the second function call, the target of the move command is x (0.4), y (0.2) and the z will remain unchanged.
The parameter
waitspecifies whether the move command is synchronous (True) or asynchronous (False).A synchronous command call is blocking. The execution returns only after the command execution is completed.
The function
reset_state()must be called before issuing another move command to the general arm commander.
# send a move command
arm_commander.move_to_position(x = 0.6, y = 0.0, z = 0.4, wait=True)
arm_commander.reset_state()
# send a move command
arm_commander.move_to_position(x = 0.4, y = 0.2, wait=True)
arm_commander.reset_state()
Move using a displacement
The function move_displacement() commands the robot arm to move based on a displacement from the current position. The following source code is from simple_move_4.py. The end-effector will move 10 cm ten times.
for step in range(10):
arm_commander.move_displacement(dy = 0.1, wait=True)
arm_commander.reset_state()
Rotate
The function rotate_to_orientation() commands the end-effector to rotate according to the given Euler’s angles (roll, pitch, and yaw). The following source code comes from simple_move_4.py.
arm_commander.rotate_to_orientation(roll = 3.14, pitch = 0.0, yaw = 0.2, wait=True)
arm_commander.reset_state()
The default values of the three component parameters are the current values.
Move to Both Position and Orientation
There are two functions for moving to a both specified position and orientation.
The function move_pose() commands the end-effector to move to a target pose, which can be of type Pose or PoseStamped.
pose = Pose()
pose.position.x = 0.4
pose.position.y = 0.2
pose.position.z = 0.6
pose.orientation.x = 0.0
pose.orientation.y = 0.0
pose.orientation.z = 0.0
pose.orientation.w = 1.0
arm_commander.move_to_pose(pose, wait=True)
arm_commander.reset_state()
The helper function list_to_pose() from the module pose_tools offers conversion of a list of xyzrpy or xyzqqqq into Pose or PoseStamped.
The following source code is from frame_move_1.py.
xyzrpy = [0.4, 0.0, 0.4, 3.14, 0.0, 0.6]
arm_commander.move_to_pose(pose_tools.list_to_pose(xyzrpy), wait=True)
arm_commander.reset_state()
The function move_to_pose can accept different pose formats, including list of xyzrpy or xyzqqqq and Pose and PoseStamped. The following passes the list of xyzrpy to the function without
the conversion.
xyzrpy = [0.4, 0.0, 0.4, 3.14, 0.0, 0.6]
arm_commander.move_to_pose(xyzrpy, wait=True)
arm_commander.reset_state()
However, the function move_pose() accepts only fully specified pose. On the other hand, the function move_and_rotate() supports partially specified xyzrpy, and the unspecified components are defaulted to the current values.
Cartesian Movement
The function move_position() supports both cartesian path planning (with collision avoidance) and algorithmic path planning (based on a path planner).
Setting the parameter cartesian to True turns on cartesian path planning. The following source code, found insimple_move_5.py compares the two
types of path planning.
# send a move command, z is defaulted to the current z value
logger.info(f'Go back to start')
arm_commander.move_to_position(x = 0.0, y = -0.5, z = 0.2, wait=True)
arm_commander.reset_state()
# send a move command moveing back to the original position, constrained cartesian movement
logger.info(f'From start to target (cartesian is True)')
arm_commander.move_to_position(x = 0.5, y = 0.0, z = 0.4, cartesian=True, wait=True)
arm_commander.reset_state()
Move to Multi-Positions or Multi-Poses Commands
The function move_to_multi_poses() commands the end-effector to move through several waypoint poses in a cartesian path. The waypoint poses are specified in a list, with each element can be a Pose, PoseStamped, 6-list (xyzrpy) or 7-list (xyzqqqq). The following source code comes from multi_move_2.py, which defines a list of 6 waypoints and commands the arm to move through these waypoints in one movement.
xyzrpy_list = [(0.6, 0.0, 0.4, 3.14, 0, 0),
(0.6, 0.2, 0.5, 3.14, 0, 0),
(0.6, 0.2, 0.6, 3.14, 0, 1.58),
(0.6, 0.0, 0.7, 3.14, 0, 3.14),
(0.6, -0.2, 0.6, 3.14, 0, 1.58),
(0.6, -0.2, 0.5, 3.14, 0, 0),
(0.6, 0.0, 0.4, 3.14, 0, 0)]
# send a multi move command
arm_commander.move_to_multi_poses(waypoints_list=xyzrpy_list, wait=True)
Similarly the function move_to_multi_positions() also commands the end-effector to move through several positions while keeping the rotation same. The xyz positions are specified as a list of 3-list [x, y, z] or 3-tuple (x, y, z). This function has an additional feature of using the current position (at the start) as the default value when any of the 3-list or 3-tuple contains a None value. The following source code comes from multi_move_1.py, which defines a list of 6 xyz positions. Note that the x component of all positions is None, and the missing value will assume the current x position.
xyz_list = [(None, 0.0, 0.4), (None, 0.2, 0.5), (None, 0.2, 0.6), (None, 0.0, 0.7),
(None, -0.2, 0.6), (None, -0.2, 0.5), (None, 0.0, 0.4)]
arm_commander.move_to_multi_positions(xyz_list=xyz_list, wait=True)